
Area Z - Integration Initiatives
Integration of research approaches: Integration initiatives and demonstrator
Our central goals and research questions for crossmodal learning require a highly interdisciplinary collaboration and the coordinated integration of research methods and results from psychology, neuroscience, and computer science. To foster the scientific exchange and collaboration within our research centre, several measures are implemented:
- Each individual project is a research collaboration from at least two PIs from different complementary scientific disciplines.
- Each project combines different research methods that often constitute a novel approach in their respective fields.
- The international character of the centre creates perspectives in different international research groups from and beyond Hamburg and Beijing.
- Research is guided by our overall objectives acting as binding themes.
These structural integration measures are complemented by three active, strategic integration initiatives that focus, evaluate, and demonstrate our joint research efforts.
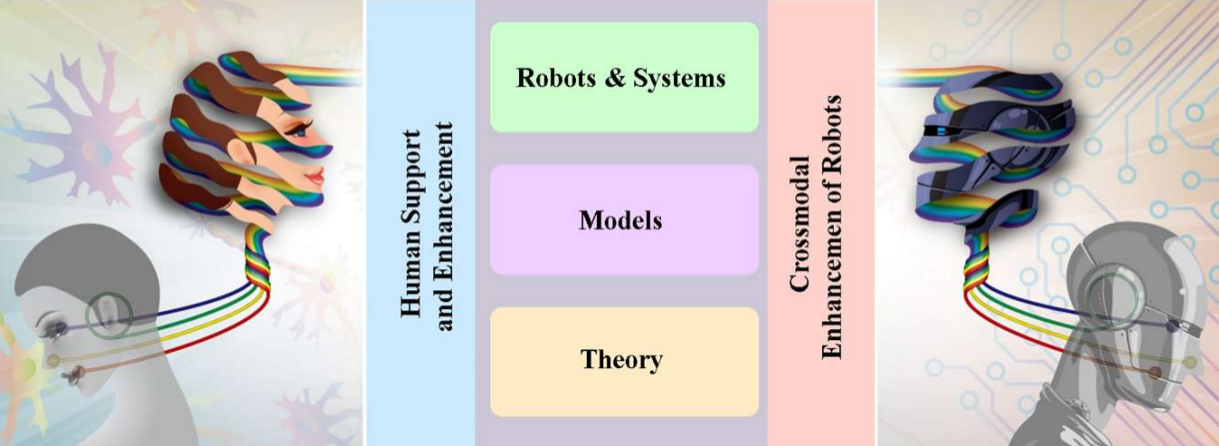
Integration Initiative on Theory (II-T) will deepen the shared, interdisciplinary understanding of fundamental concepts of crossmodal learning that we have built between different sciences during the first phase. II-T will organize centre-internal meetings and theory discussions that in turn lead to publications, sym- posia and conference workshops to bring the centre’s scientific output to a broader audience.
Integration Initiatives on Models (II-M) will integrate models from different projects into a unified model architecture. The initiative will also foster the exchange of experimental paradigms from different disciplines. II-M will aid in the adaptation of theoretical models into computational models as well as the use of shared experimental setups, e.g., the same laboratory setting will be realized for human and robotic participants.
Integration Initiative on Robots and Systems (II-R) will integrate and demonstrate the scientific innovation of the centre in crossmodal application scenarios. II-R will create robotic demonstrators for the embodiment of our II-M model architecture into physical robotic agents that interact with a multimodal environment. Furthermore, II-R will also aid in the development of crossmodal systems for human support and enhancement. II-T is implemented and coordinated by project Z2. Due to their related methodology, II-M and II-R are implemented by project Z3.
Together, the Z-projects are responsible for (a) integration across all projects in the centre and (b) advancement of the of the scientific result of the Centre in laboratories for joint human-robot demonstrator and model architecture to be able to embody and showcase the scientific advances in the TRR for a variety of crossmodal learning tasks. These tasks encompass complex motor control, crossmodal perception, and linguistic and non-linguistic communication abilities for social and physical human-robot interaction. On an organizational level, the Z-projects coordinate the contributions of individual projects to the different integration initiatives.
See also:
Thematic Area A,
Thematic Area B,
Thematic Area C,
Thematic Area Z