Project B5 - Crossmodal fusion for dexterous manipulation in proactive human-robot collaboration
PIs: Prof. Dr. Fuchun Sun, Prof. Dr. Jianwei Zhang
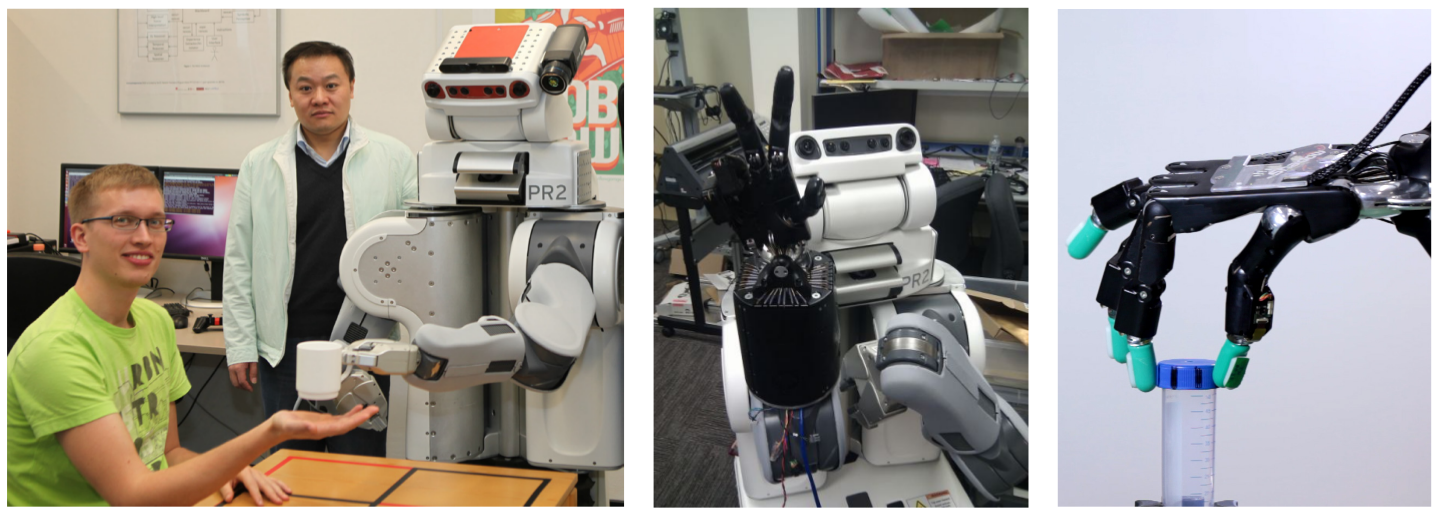
Project B5 will explore methods for integrating crossmodal information into the learning and execution of robot fine-motor operations such as dexterous manipulation and human-robot collaboration, which require the integration of multiple sources of sensory information. The project will achieve this goal by (1) recording and analysing grasping strategies demonstrated by humans; (2) developing an approach for learning multimodal representations of human manipulation skills based on a rich set of sensor information; and (3) validating this approach by transferring those skills onto an anthropomorphic multi-fingered robot hand.